First Chapter
简介
Apple提供获取视差图的API
- iPhone怎样获取图片的深度信息
- 从图片中读取深度信息
- 对深度信息运用滤波器创建惊艳的效果
iPhone怎样获取图片的深度信息
iphone的双摄像头可以模仿立体视觉
距离人的眼睛近的物体,相对于背景的位置变大
iphone的双摄像头就像人的眼睛一样,看到两张图片,计算这两张图片移动了多少像素,像素的改变叫做视差,Disparity
从图片中读取视差数据
struct DepthReader {
var name: String //图片名字
var ext: String //图片扩展名
//获取图片深度信息的方法
func depthDataMap() -> CVPixelBuffer? {
guard let fileURL = Bundle.main.url(forResource: name, withExtension: ext) as CFURL? else {
return nil
}
guard let source = CGImageSourceCreateWithURL(fileURL, nil) else {
return nil
}
//从图片中获取包含视差数据的辅助数据
guard let auxDatainfo = CGImageSourceCopyAuxiliaryDataInfoAtIndex(source, 0, kCGImageAuxiliaryDataTypeDisparity) as? [AnyHashable : Any] else {
return nil
}
var depthData: AVDepthData
//从辅助数据中获取视差数据
do {
depthData = try AVDepthData(fromDictionaryRepresentation: auxDatainfo)
} catch {
return nil
}
//确保深度数据的格式为 32-bit floating point disparity information
if depthData.depthDataType != kCVPixelFormatType_DisparityFloat32 {
depthData = depthData.converting(toDepthDataType: kCVPixelFormatType_DisparityFloat32)
}
return depthData.depthDataMap
}
}
把视差数据转化为图片
func loadCurrent(image name: String, withExtension ext: String) {
let depthReader = DepthReader(name: name, ext: ext)
//获取图片的深度数据
let depthDataMap = depthReader.depthDataMap()
//单位化深度数据,使深度数据在0和1之间 0: 代表距离最远的数据 1:距离最近的数据
depthDataMap?.normalize()
let ciImage = CIImage(cvPixelBuffer: depthDataMap)
depthDataMapImage = UIImage(ciImage: ciImage)
// Create the original unmodified image
origImage = UIImage(named: "\(name).\(ext)")
filterImage = CIImage(image: origImage)
// Set the segmented control to point to the original image
imageModeControl.selectedSegmentIndex = ImageMode.original.rawValue
// Update the image view
updateImageView()
}
Depth vs Disparity 深度和像素差距
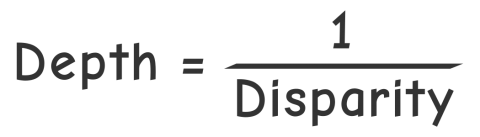
对象越远,depth越大,像素之间的距离越近越接近于0
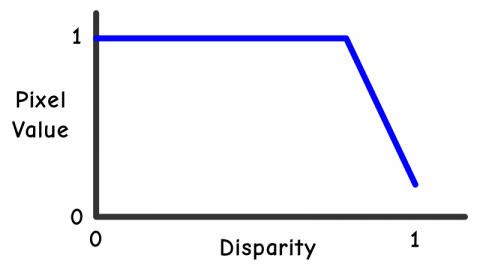
转化深度数据到Image mask

depth map image的pixel value 等于单位化的Disparity
pixel value1.0是白色的 ,Disparity为1.0距离摄像头最近
pixel value 0 黑色的,Disparity为0,距离摄像头远
当根据深度数据创建mask之后,需要改变该函数做一些有趣的事
sing a slope of 4.0, a width of 0.1, and 0.75 as the focal point

最白的地方在视差数据0.75 +- 0.5的地方,然后将随着视差数据的变大而快速变暗
对depthImage用如下函数的滤波器
func createMask(for depthImage: CIImage, withFocus focus: CGFloat, andScale scale: CGFloat) -> CIImage {
let s1 = MaskParams.slope
let s2 = -MaskParams.slope
let filterWidth = 2 / MaskParams.slope + MaskParams.width
let b1 = -s1 * (focus - filterWidth / 2)
let b2 = -s2 * (focus + filterWidth / 2)
//用s1去乘所有的像素值,mask image为灰度图像,因此需要确保所有的颜色通道有着相同的值
//用CIColorClamp使得所有值在0和1之间
let mask0 = depthImage
.applyingFilter("CIColorMatrix", parameters: [
"inputRVector": CIVector(x: s1, y: 0, z: 0, w: 0),
"inputGVector": CIVector(x: 0, y: s1, z: 0, w: 0),
"inputBVector": CIVector(x: 0, y: 0, z: s1, w: 0),
"inputBiasVector": CIVector(x: b1, y: b1, z: b1, w: 0)])
.applyingFilter("CIColorClamp")
let mask1 = depthImage
.applyingFilter("CIColorMatrix", parameters: [
"inputRVector": CIVector(x: s2, y: 0, z: 0, w: 0),
"inputGVector": CIVector(x: 0, y: s2, z: 0, w: 0),
"inputBVector": CIVector(x: 0, y: 0, z: s2, w: 0),
"inputBiasVector": CIVector(x: b2, y: b2, z: b2, w: 0)])
.applyingFilter("CIColorClamp")
return depthImage
}

s1越大,坡越陡,常数b1向左或右移动
mask1函数 s2是负值
创建一个聚光灯滤波器
REF:
https://www.raywenderlich.com/168312/image-depth-maps-tutorial-ios-getting-started